



目的と目標
スピンドルモーターの負荷限界線図は、回転速度などのパラメータの関数として許容動作範囲をグラフィカルに表すために使用されます。これにより、スピンドルが機械的、熱的、または動的限界を超えることなく安全かつ確実に動作できる条件を迅速に評価できます。このような線図は、機械工学、特に精度、性能、および耐用年数に対する高い要求が求められる機械加工分野において、スピンドルシステムの設計、選定、評価に不可欠なツールです。
同じ方法論は、トルク、速度、熱、構造上の限界が設計と適用において中心的な役割を同様に果たす電気モーター全般にも適用できます。工作機械、ロボット工学、自動車工学、産業用駆動装置など、どのような分野においても、体系的に作成された負荷限界線図は、モーターを意図された動作点において安全かつ効率的に使用するための確固たる基盤となります。
これらの相互関係をより深く理解するために、本技術レポートでは、負荷限界線図の体系的な導出方法を説明します。物理的な基礎に加え、軸受配置、駆動システム、冷却、構造設計に起因する実用的な制約についても考察します。スピンドルの限界挙動を決定する主要な影響要因を特定し、MESYSを用いてそれらを分かりやすくシミュレーションベースの形式で提示することを目標としています。
初期状況
仕様:
検討対象とした仮想アプリケーションは、最大トルク10.75Nm、最大回転速度36,000rpmのアルミニウム加工用高速スピンドルモーターです。工具ホルダーにはHSK-F63インターフェースを使用します。適用工具半径はr=12mmで、直径24mmのエンドミルに相当します。
軸受コンセプト:
スピンドルは、スプリング予圧されたO字型タンデム軸受セット2組によって支持されており、各軸受セットはフロントとリアのベア軸受で構成されています。以下の軸受の構成が採用されています:
– Front bearing pair: 7010, contact angle = 18°
– Rear bearing pair: 7010, contact angle = 18°, スプリング予圧 1300 N
この配置は、高速スピンドルモーターの典型的な構成に相当します。高い剛性と性能を維持しながら、アキシアル方向の熱膨張を吸収することができます。
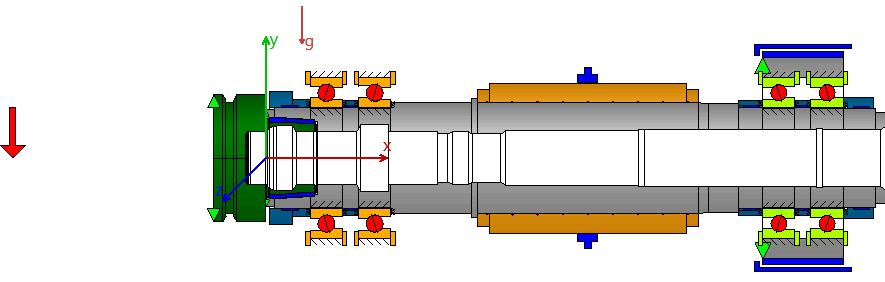
取り付け方向:
スピンドルは水平に取り付けられているため、フロント軸受セットが重力によって負荷を外れるのを防ぎます。この位置の影響は計算に考慮されています。
制限を必要とする影響要因
機械的な制限
• 最高速度:軸受能力、回転部品、遠心力、またはバランス精度によって制限。
• 最大トルク:モーター、巻線、ローター構造、またはインバータの性能によって制限。
• 接線方向の工具荷重:主軸に曲げモーメントが発生。
• ラジアル力:主軸の運動学特性が劣化。
• アキシアル力:負の場合には特に重要。
• ラジアル/アキシャル荷重の合成:軸受の非対称な荷重が発生。
• 主軸の方向:垂直位置では、重力によってフロント軸受セットの荷重が減少する可能性がある。
軸受関連の制限
• 軸受のミスアライメント:運動学と接触圧力に影響
• ヘルツ接触圧力:疲労寿命に影響
• スピン・ロール比:運動学に影響
• ボールの進み/遅れ:運動学に影響
熱的制限
• ローターの動力損失:シャフトセグメント間の温度勾配
• 軸受シートの加熱:温度勾配は、予圧、運動学、および軸受寿命に変化をもたらします
• 熱膨張:軸受ペアの補正または挙動に影響します
限界曲線の決定方法
本スタディでは、スピンドルモーターの技術的に一貫性のある負荷限界曲線を生成するために、一連の模範的な制限条件を定義しました。これらの条件は説明目的にのみ使用され、回転速度の関数として許容負荷範囲を明確に定義することを可能にします。当然のことながら、今後のスタディでは、例えば完全な負荷限界マップを生成するために、より複雑で現実的な基準が考慮される可能性があります。
説明したシミュレーションでは、スピンドルノーズからのアキシアル方向距離がx = –80 / –100 / –120mmの3つの作業位置で最悪の負荷シナリオが定義されました:
• 接戦方向の力: 100%
• アキシアル方向の力: –33%
シミュレーションでは以下の限界状態が考慮されます。:
• 最小ヘルツ圧力: pmin > 500 MPa
• 最大ヘルツ圧力: pmax < 2000 MPa
• スピン/ロール 比: < 0.3
• 最大伝達トルク: Mx < 10.75 Nm
MESYS パラメータ化と評価
MESYSのシャフト計算モジュールは、負荷限界曲線を決定するために使用されます。パラメータバリエーションの最適化機能「条件に基づいて入力を最大化」を適用することで、定義された限界値を遵守しながら最大許容荷重を決定します。
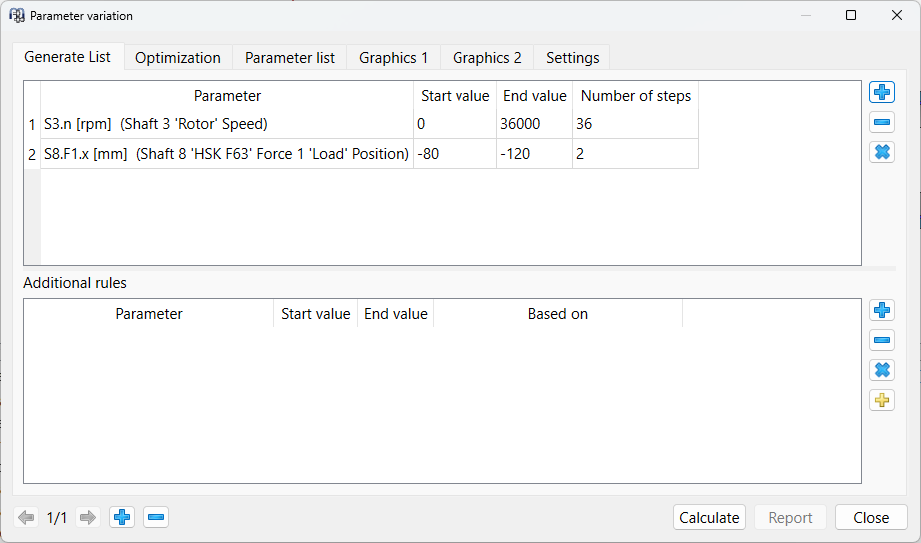
パラメータリスト
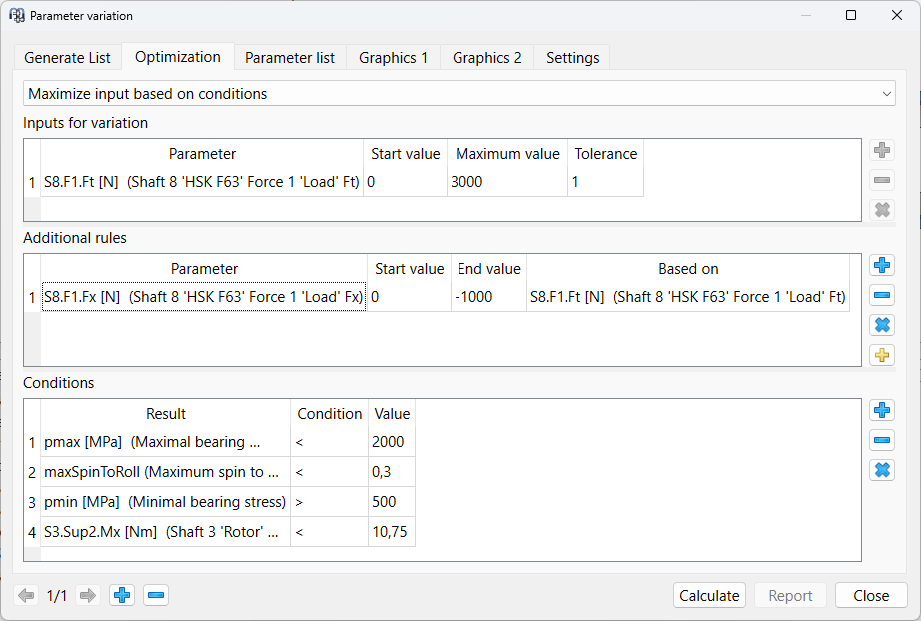
最適化基準
ソフトウェアは、すべての限界条件を同時に満たす限り、荷重を反復的に増加させます。このようにして、各速度レベルにおける最大許容力の組み合わせが決定されます。
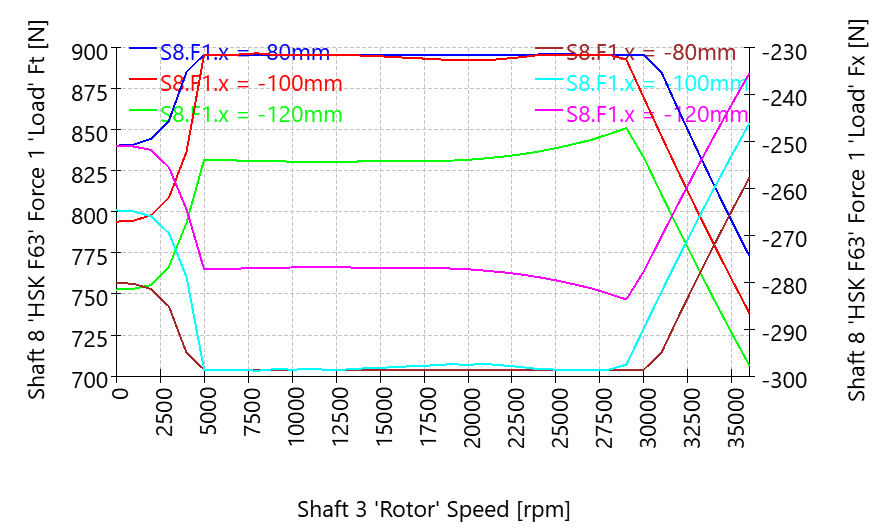
接触応力 min. / max.
=> pmin limits x = –100 mm up to 4000 rpm
=> pmax limits x = –100 mm between 13000 and 24000 rpm
=> pmax does not limit x = -80 mm
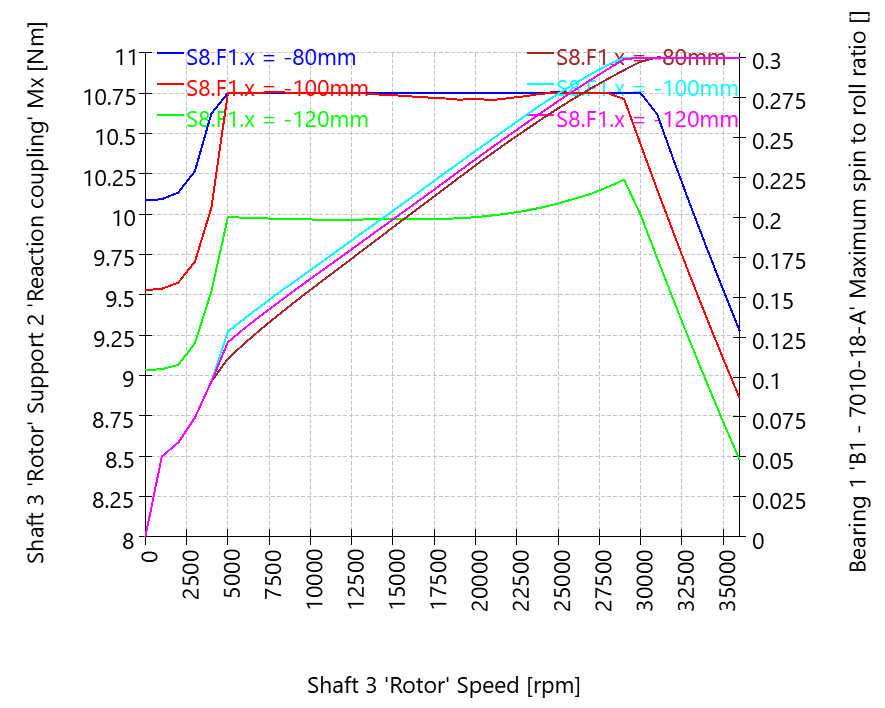
転がり軸受1の出力トルクと運動学
=> Mx limits x = –100 mm from 5000 to 12000 rpm and from 25000 to 28000 rpm
=> Spin-to-roll ratio limits x = –100 mm at B1 from 29000 to 36000 rpm
=> The motor power cannot be fully exploited at x = –120 mm, as pmax is the limiting factor
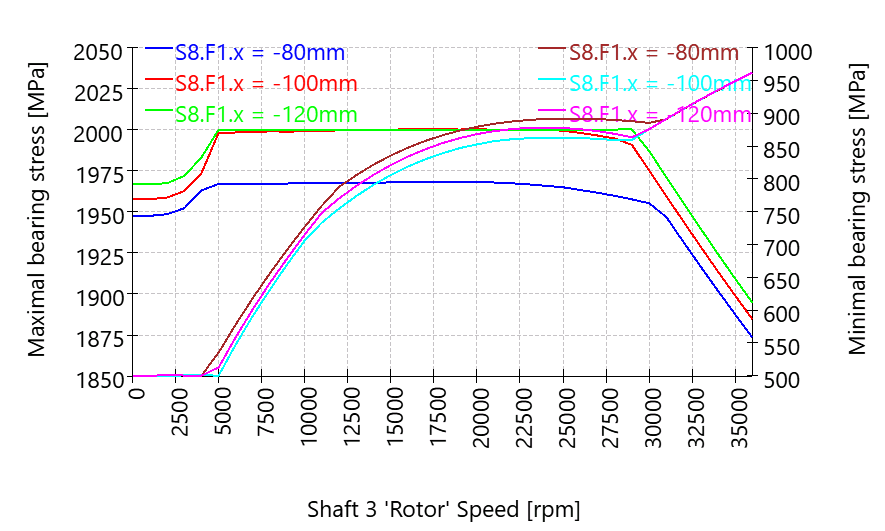
負荷限界曲線の結果と解釈
得られた負荷限界線図は、スピンドルモーターの最大許容負荷を回転速度の関数として示し、事前に定義されたすべての限界条件を満たしています。
包絡線から得られた主な知見:
低回転速度(5,000rpm未満)では、負荷は最小軸受圧力を下回ることで制限されます。これは、軸受の傾きや接触不良の可能性を防ぐためです。
約5,000~30,000rpmの範囲では、広い使用可能帯域が形成され、軸受の限界状態に達することなく、スピンドルの負荷容量を最大限に活用できます。したがって、この範囲は経済的に効率的な動作範囲と考えられます。
約30,000rpm以降では、転がり軸受1におけるスピン/ロール基準が制限要因となります。これは、非常に高速でのラジアル負荷が軸受の運動学を乱し、関連する問題を引き起こす可能性があるためです。
Load Limit Diagram
全体として、生成された負荷限界曲線は、スピンドルの設計上の余裕度と物理的限界の両方を明確に示しています。これらの曲線は、適切な適用範囲の定義、加工戦略の計画、そして重大な過負荷の回避のための基礎となります。